
But why form a team at all? What common challenge has caused this colourful collection of comrades to coalesce? What is our mission?
The mission (a summary):
- Launch
- Measure all the things
- Survive landing
- Plot all the measurements of all the things
- ???
- Profit
What?
Yes its pretty basic. The satellite is really small, give it some credit!
On board the satellite we have a barometer, thermometer, inertial measurement unit, GPS receiver, WiFi transceiver, and an SD card slot for storage. The primary challenge for this whole programme is to design, build, test, and fly a data collection satellite. All the teams have to do that, and whoever does it the best wins. What do they win? Pride. Probably. Maybe food. The essential fuel for rocket science.
Okay post over you can leave now bUT WHOA PLOT TWIST
There’s a second mission. Boom. Didn’t see that coming did you. Our team is also running an experiment of our own alongside the main mission.
Our second mission (a summary):
- Launch
- Measure the things more often
- Survive landing
- Plot the things
- Math
- Profit
Right. Not much different? Or is it. Here’s some background.
GPS is really useful for accurately positioning yourself or your satellite, except for one problem: it doesn’t work above certain altitudes or certain speeds. If it did, you could make guided missiles with hobbyist electronics kits. Which is a problem. You have to pay a significant fee to get a GPS module without this restriction, which is obviously not fee-asable (I’m sorry) for budget satellite projects. A satellite in orbit is moving at over 7 kilometers per second and is quite definitely over the altitude limit.
So how do you know where your satellite is without GPS? There are lots of methods, radar, laser, triangulation, but these all have their own problems. So our plan is to use something called Dead Reckoning (which is not the name of our heavy metal band) to use the on-board sensors to track the satellites position. This is where you use the accelerations measured by the satellite to determine its speed, and then its speed to determine how far it has moved. This method also has problems (which I’ll get into more in a later post) but when combined with other methods of positioning (in our case we have a GPS module for accurate absolute positioning) we hope it will give us a pretty nice idea of our flight path.
What are we doing to actually implement this mission? Well I’m glad you asked, here, have some math:
Turning accelerations into position
Look fun?
These three equations just take the measured accelerations and turn them into positions. Which is what we want right? Hooray we’re finishe- NOPE there is more math.
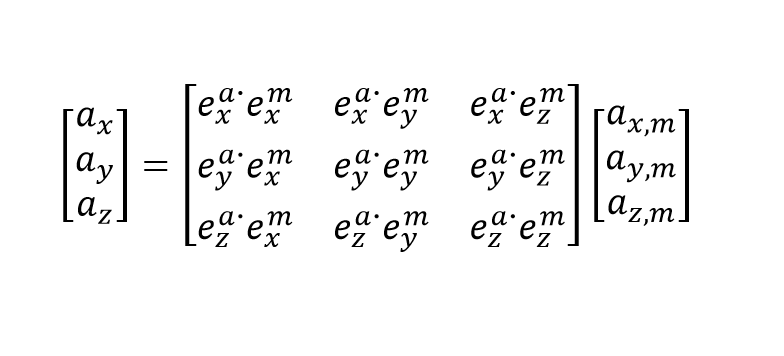
Rotating the measured acceleration vector to counteract the satellites spin
This big square looking thing is a formula for rotating the measured acceleration to counteract the spin of the satellite. All those e’s refer to the axis directions of the satellite and the ground. Now we’re don- NOPE there is more.
How do we know what angle the satellite is at so that we can counteract it? We have gyroscopes on board that can tell us it’s spin rate, and then we can liberally apply calculus and Microsoft Excel until this turns into something useful to us. The math never ends. Riley and Emma are pleased.
Finally. The math is over. Let’s pretend that it all worked just fine, and now we have a really nice looking trajectory. Cool, what now? Why do you even need that? Gosh your mission is so dumb what a waste of tim- Um actually this is our blog post stop interrupting. This mission is a proof of concept, and an exercise in developing the software algorithms required to implement a Dead Reckoning (touring 2018) system for a satellite. A system like this has the potential to make a cheap orbital satellite mission more possible (which is actually something we need for another APSS project, read more at: link coming soon, hopefully)
Sound cool? Well we think it does. Next year maybe we’ll work on propulsive landings… Then a P-Sat on mars
Until next time,
– The Elon Musketeers