
October 11, 2017
Welcome back to Team Rocket 4 Lyfe! The last two weeks of work has been condensed into this single blog post, though not for the lack of progress that has been achieved. Today we go over our advances in hardware and software, a special preview with our pilot of this mission, and how we will keep in contact. At the end, there’s a little sneak peak of what’s in store.
Before we get started, check out our web app that should be displayed below! Look under the ‘Result’ tab!

Hi, I’m Feather! You’ll be hearing about me later!
The ‘Result’ tab of the web app can display and plot our sensor data live. Our Feather will act as a kind of pseudo-router, allowing a computer to connect to it, then creating a server which the WebApp will pull its data from.
Wings to fly
A tailored suit
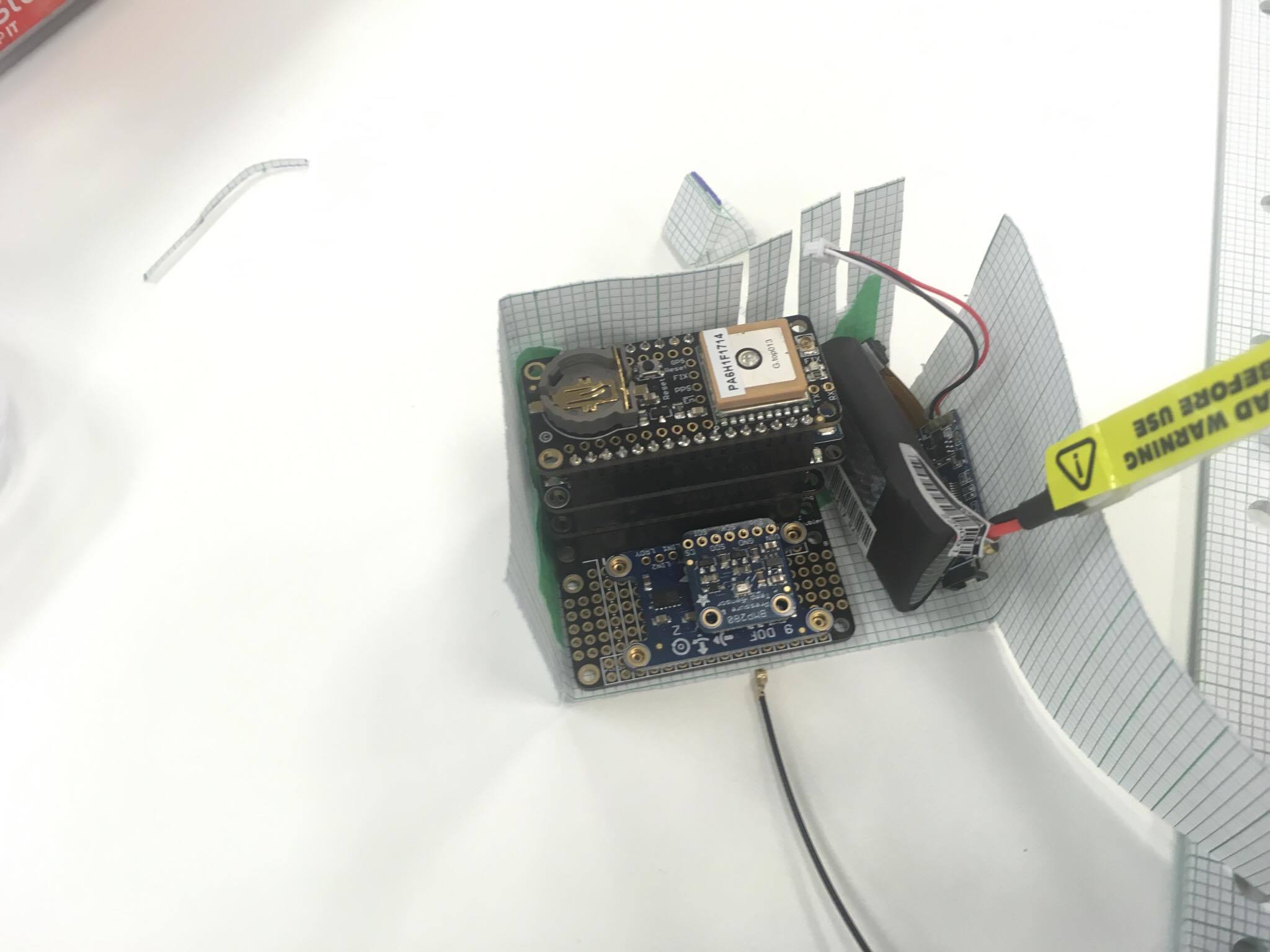
Prototyping has begun! Shown here is a mockup of the Team’s PSat, giving us an idea for the shape and space of our final design. Progress also marches onward in software. Our code continues to grow, all the separate projects being merged into the master branch on our GitHub page. A huge amount of code is being created, modified, and optimised through this website. For instance, due to the architecture of MATLAB, the decision was made to switch to cell arrays for storing the data arrays and strings, as the software concatenates instead of nesting them.

Potential scientists take note: glamour of new technologies and discovery, this is what you’ll find at the end of the day. Ask the others if you want to know what it means, but I’m suddenly a lot happier with my BA
The GPS module of our PSat now has the ability to save latitude and longitude data to the SD card, after arduous trial and error by our coders. Now, any other kind of GPS data (such as time, altitude, or speed) can be saved to a secondary SD card. Coupled with the camera’s already confirmed functionality, data transmission will be next in line to be made operational.
Now, it’s time to introduce someone very special. Let me take you to meet our pilot, Feather.
Birds of a feather

Despite the lack of in-flight entertainment, there’s no chance I’ll be board!
The Adafruit Feather M0 WiFi w/ATWINC1500, or affectionately ‘Feather’, is our pilot for the mission. Providing the spine of the system, it carries to Wi-Fi connectivity that our Team will use to keep in contact with the many modules of Team Rocket’s PSat. It’s Feather’s role to keep our instructions and data flowing back and forth between the Team and the PSat.
Let’s have a look at how this communication will be handled.
Going the distance

I’m essentially just a router, but don’t diss it
Wi-Fi transmission is one of the more difficult parts of the PSat’s code, though work has been saved with the discovery of the site JSFiddle. The site is used to stream arduino data to a browser, giving the team a comparable architecture to adopt for the Feather Wi-Fi board.
As can be seen pictured, the Ubiquiti NanoStation M2 will be our groundstation, connecting to the onboard Feather for our data.
As always, there is further room for optimisation to be done, as we work towards making our flight the best it can be.
The ever uphill climb
Despite its perfect working condition last time, problems sprung up with our camera ceasing functionality. Despite initial concerns for a software fault, it was discovered that with the current wiring of the camera in parallel, it would draw too much power. This is compounded by the fact the Feather’s power supply only gives a measly 3.3 volts for the camera’s rated 3.37 to 5 volts.
Currently the team is working on whether or not the ground station can extend the range of Feather’s access point.
Chasing space
Thanks for reading! We will be aiming for closer-to-weekly blog updates from now on. To keep you hooked, here’s a sneak-peak of what is to come:
At the time this blog was written, we are three weeks away from launch. Till next time, this is Team Rocket for Lyfe, blasting off again.